Inspired by Biology, Physicists Make More Efficient Motors
Learn about how UT Austin physicists are using human muscles to design more efficiently designed robots.
Physicists at The University of Texas at Austin have discovered that mimicking human muscles can lead to more efficiently designed electric motors for use in robots and appliances. Their bioinspired motors use up to 22% less energy, have a greater range of motion and can lift objects higher than typical electric motors.
Assistant professor of physics José Alvarado and his group, including graduate student Jake McGrath, published their results this month in the journal Bioinspiration and Biomimetics. The motors will need further refining before they can be fully deployed in technological applications.
In their experiment, they compared how a muscle and a traditional direct-current (DC) motor would lift a weight up from the ground. The DC motor will yank the object with the maximum amount of force it can apply at that moment and will continue doing so as it lifts the weight.
"The construction of muscle, however, allows for a more fluid, continuous and gradual movement," McGrath said. "Muscle can smoothly lift the object that does not require it to continuously yank on the weight as with all of its power."
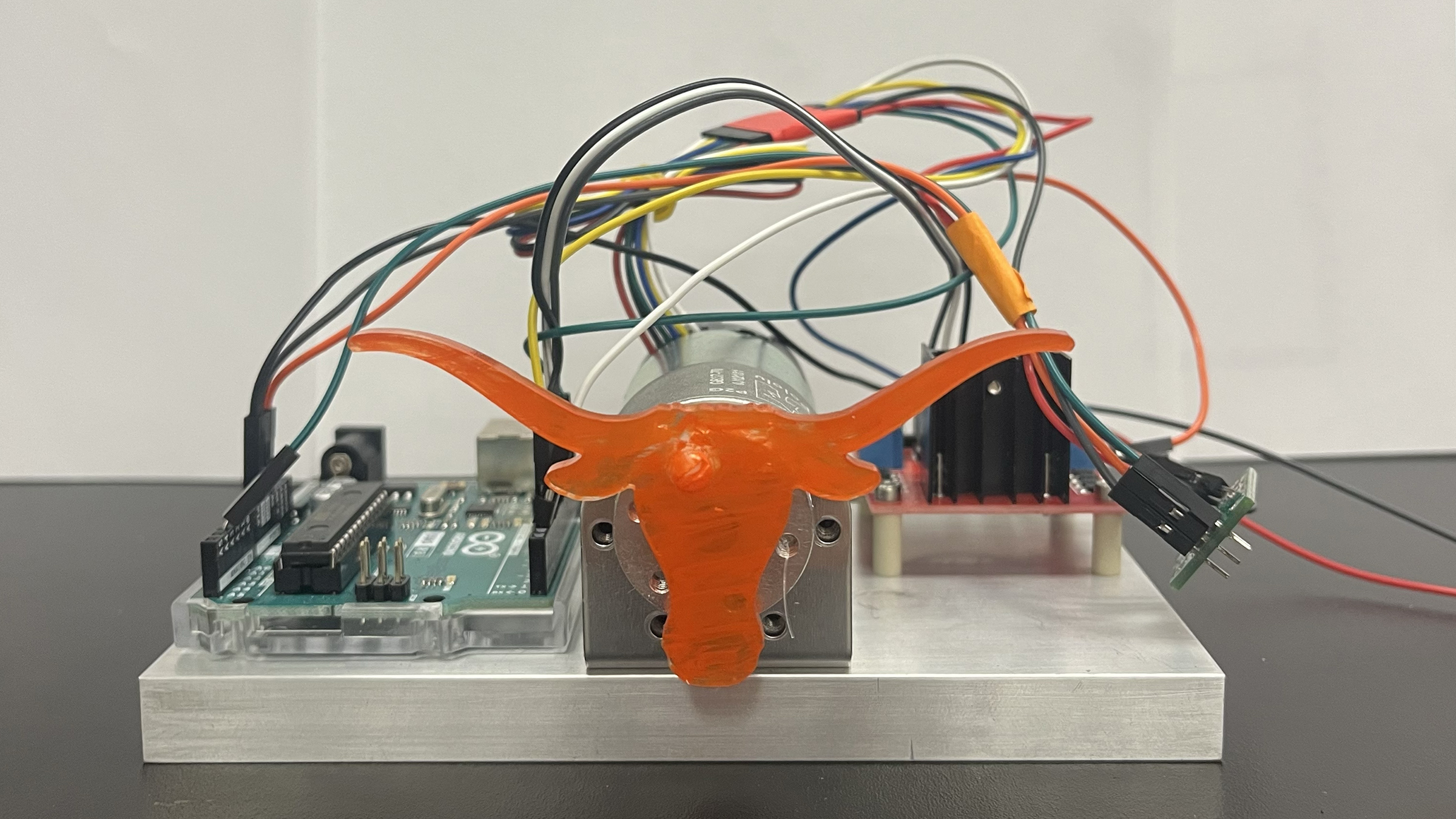
To have their motor behave like the fluid, energy-efficient muscle, the researchers used a device called a proportional-integral-derivative controller (PID), which works like cruise control in a car. The PID can recognize an error between the current speed and the set speed of cruise control and corrects by increasing or decreasing the force.
Muscles have been shown to provide performance advantages useful for robotic systems, such as energy efficiency, stability, or increased range in motion. How muscles create these performance advantages, however, still remains largely unknown.
Physiologist Archibald Hill developed a simple mathematical model, called the Hill model, that characterizes how force and velocity are correlated in contracting skeletal muscle. Unlike a standard DC motor, the force applied by a muscle in the Hill model isn't linearly correlated with velocity. So for example, if a muscle lifts one object and then another that's twice as heavy, it might not double the amount of force, it might increase the force by some smaller amount and reduce the lift velocity in a way that minimizes energy expenditure.
The authors argue that their bioinspired motor is useful because it is difficult to investigate how the nonlinear design of muscle creates these observed performance advantages in an actual sample of muscle tissue. This model system allows them to test how muscle initiates these advantages while sidestepping the complexities of the neuromusculoskeletal system.
"That way, we could investigate the performance advantages generated by the Hill model of muscle in this simple model system," McGrath said.
In the future, McGrath said that they want to see how muscle's nonlinear force-velocity relationship could provide stability in locomotion. As an example of stability, if you were to go for a jog outside on rocky, uneven grounds, the nonlinear force-velocity behavior of your muscles may be able to provide passive stability, allowing you to continue jogging without falling. This work could also be beneficial for the development of prostheses.
"Our ultimate goal is to emulate more properties of muscle and design new kinds of robotic components inspired by muscle," Alvarado said.